Hmm,
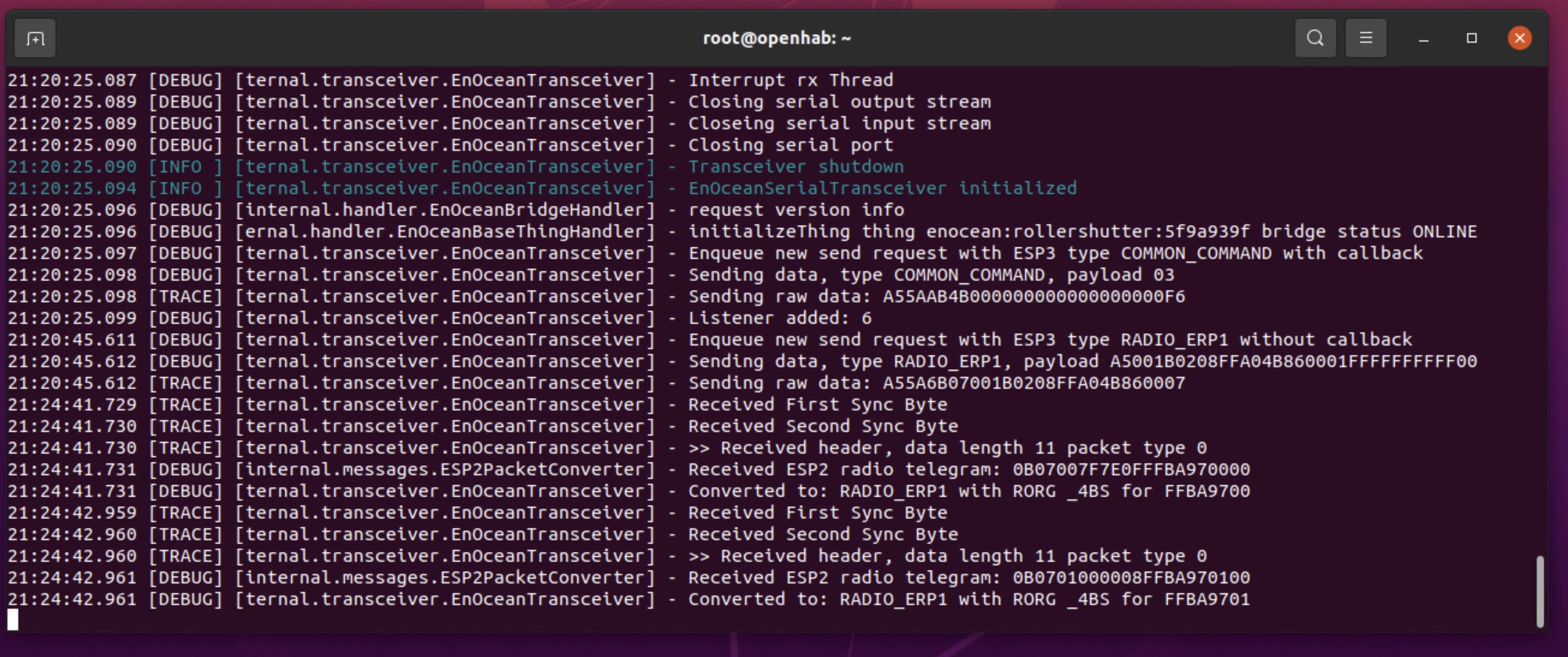
from what I can tell looks good, esp as you seem to be able to receive ok.
Perhaps try to take complexity out be directly using the USB and not going thru ser2net (just for testing).
As you mentioned it worked using a USB300, did you teach in the new setup to the actuator ? Because base-id changed it won’t react.
Perhaps you could also go back to the working configuration and try only to change small pieces to isolate ?
This post from the binding author may also give you some background info.
I do not know your exact setup, but this may apply to you :
It is not possible to control radio actuators (actuators not connected to the bus) when you are connected to a RS485 gateway. The FAM14 transmits only filtered bus telegrams into the radio network. So if you want to control radio actuators too, you still have to use an USB300 or integrate a FTD14 into your RS485 bus. This device is intended for transmitting bus telegrams into the radio.


{kind=link}